

聚光太阳能发电技术概述及展望
发布时间:2011-04-26 来源: 上海太阳能工程技术研究中心有限公司
本文摘要:介绍了聚光太阳能发电技术中两个主要的发电技术,聚光光伏发电和聚光热发电系统的构成,已达到的技术水平和产业化程度。
2.3 太阳跟踪器
由于聚光光伏组件需要直射光才能发电,因此必须安装在太阳跟踪机构上。通常来说,点聚焦的聚光组件需要二维跟踪机构,线聚焦组件只需要一维跟踪机构。目前跟踪太阳的方法主要有以下几种:
·利用四象限光敏传感器判断太阳的位置。这种跟踪方式精度很高,并且是闭环控制,能自我修正,聚光太阳能应用中通常都需要使用光敏传感器。
·根据跟踪机构所在地的经纬度计算太阳的位置。这种技术也可配合GPS全球定位来获得更精确的位置和时间信息。
·根据预置的太阳位置数据库或移动轨迹来跟踪太阳。这种跟踪方式比较死板,换个地点就要更新数据库,跟踪精度也比较低。
·对电池阵的输出功率进行监测,使电池阵的输出功率保持最大。
目前,用于聚光系统的跟踪机构都采取几种不同的跟踪方法确保跟踪精度和可靠性。跟踪机构还需要大风自我保护功能和防暴雪功能来确保组件的安全。而跟踪器传动机构的设计则决定了跟踪器的寿命。对于二维跟踪机构,其跟踪精度基本要求在±0.5度。
·太阳能聚光热发电系统
太阳能热发电技术主要有槽式、碟式和塔式三种[2]。
塔式太阳能热发电主要由定日镜系统、吸热与热能传递系统、发电系统三部分组成。定日镜系统实现对太阳的实时跟踪,并将太阳光反射到吸热器。位于高塔上的吸热器吸收由定日镜系统反射来的高热流密度辐射能,并将其转化为工作流体的高温热能。高温工作流体通过管道传递到位于地面的蒸汽发生器,产生高压过热蒸汽,推动常规汽轮机发电。典型的塔式太阳能发电系统可以实现200-1000倍以上的聚光比,投射到塔顶吸热器的平均热流密度可达300-1000kW/m2,工作温度可高达1000℃以上。电站规模可达200MW以上。

图5a 美国Solar Two 10MW塔式太阳能电站
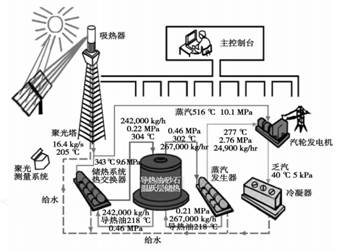
图5b Solar Two工作原理图
分享到:
相关文章
- 太阳能高速公路离我们有多远?2015-07-01
- 2020太阳能宇宙飞船前往木卫二寻找生命迹象2015-05-28
- 宁波企业成功研发双面吸光太阳能电池 2015-05-28
专题报道
- 第九届中国(无锡)国际新能源大会
-
 本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...
本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...











