

智能太阳能充电电路设计
发布时间:2013-07-01 来源: OFweek太阳能光伏网
本文摘要:针对油田无线示功仪及其无线网络节点的供电问题,采用开关电源技术实现了太阳能组件电压变化或负载波动时自动调节占空比的供电网络,运...
针对油田无线示功仪及其无线网络节点的供电问题,采用开关电源技术实现了太阳能组件电压变化或负载波动时自动调节占空比的供电网络,运用自动控制技术设计了过电压保护电路、过放电保护电路与应急充电电路等, 采用充电管理技术实现了锂电池充电及电压调节电路,根据光敏传感器输出差值比较电压设计了太阳自动跟踪控制器。 该太阳能充电电路思路新颖,在应用上是一种突破,工作效率达到92% ,输出电压精度为98% ,系统运行一年来,工作性能安全、稳定。 应用证明具有较高的实用和推广价值。
随着无线技术的发展,无线网络技术越来越多投入到实际应用中, 无线传感器网络一般分布范围较广,架设供电线路,投资大,维护成本高。 如采取干电池方式供电,则每个节点的电源供电能力有限,对每个节点更换电池不仅费时、费力,增加成本,而且影响工作效率。 能否稳定持续的供电,成为制约油田无线示功仪及其无线网络发展的一个重要因素,太阳能技术的发展使供电方式产生了飞跃式的发展,已经成为油田无线示功仪及其中继网络节点供电方式的发展方向。 本文拟对油田监测示功仪及中继网络节点设计一种智能化、免维护型的太阳能充电电路,为无线网络节点供电。 该设计电路具有以下特点: ①基于开关电源技术设计的充电网络具有自动调节占空比的功能, 具有很宽的输入电压范围。 ②采用线性电源管理芯片,用先预充2恒流2恒压的充电方式完成整个充电过程。 ③采用低噪声、高速度的CMOS 型电压调节器,具有高精度的恒压、恒流输出。 ④充电过压保护、锂电池过放电保护功能,使锂电池充、放电安全可靠。 ⑤自动跟踪太阳的功能,太阳能采集板始终保持对准太阳,充分利用太阳能。
系统设计
现有的光伏电池,单体的输出电压都很低(在1V 以下) ,本设计中,将多个光伏电池相串联,组成太阳能组件。 通过可以自动调节占空比的供电网络保证在光照强度变化和负载变化时,输出电压基本稳定,为充电管理芯片提供稳定的电压输入。 通过对供电网络的副边电压监测,保护充电管理芯片不因电压过高而损坏。 通过对电池两端的电压监测,保证锂电池不会因过放电而损坏。 由于无线示功仪及其中继网络节点的供电要求是313V,采用低噪声、高速度的CMOS型电压调节器。 在自动跟踪控制器作用下,始终保持全天候跟踪太阳。 为了防止因连续阴雨天而导致的太阳能供电不足,设计应急充电电路,充电期间,无线示功仪及其节点正常运行。 具体系统设计模块如图1所示。
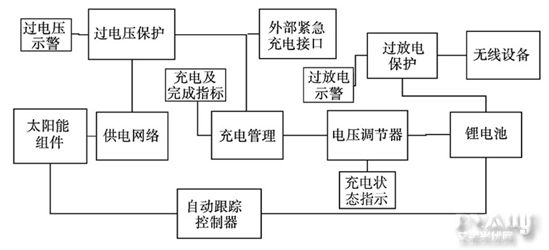
图1 系统设计示意图
硬件电路设计
太阳能组件及充电电路设计
本文设计中采用16个光伏电池串联,组成电压约为1218V 的太阳能组件,通过采集较高多的光能,保证日照能够使锂电池完全充满电。 供电网络设计电路采用正激式拓扑结构[ 1 ] 。 具体电路如图2所示。
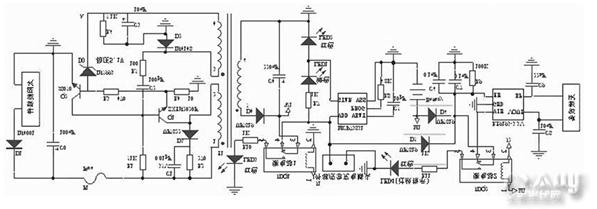
图2 智能型太阳能充电电路设计主电路[page]
太阳能组件产生的电能,一路经过开关变压器T1 的122绕组加至开关管Q1 的集电极( c) ,另一路经过R1 为Q1 提供基极电压。 当基极( b)的电压为高电平时, Q1 开始导通,变压器T1 的122绕组中产生1正2 负的电动势,经T1 耦合,在T1 的324绕组中产生3正4负的感应电动势,此电动势经R5 , C2 叠加到Q1的基极( b) ,使Q1 迅速饱和导通。 由于变压器T1 的122间的电流不能突变,在此过程中会产生1负2正的电动势。 变压器T1 的324绕组中感应出3负4正的电动势,通过R5 , C2 ,使Q1 迅速进入截止状态。 经R1 对C2 的不断充电, Q1 又开始导通,进入下一轮的开关振荡状态。 在导通期间, T1 变压器的副边绕组526,经整流二极管D4 向外输送能量。
稳压电路由稳压管D0、三极管Q2 等元件组成。 当负载减轻或太阳能组件输出电压升高时, A 点电压上升。 当该电压大于511V 时, D0 击穿, Q2 因b2e结正向偏置而迅速导通,使Q1 提前截止,从而使输出电压趋于下降;反之,则控制过程相反,从而使变压器T1 副边输出电压基本稳定。 当负载过重时, Q1 的c2e电流增大, R4 上的压降也随之增大。 当该电压大于017V 时, Q2 导通, Q1 截止,达到过流保护的目的。 为避免截止期间变压器T1 的122 绕组感应出的尖峰脉冲击穿开关管Q1 ,并联了尖峰脉冲吸收电路。
过电压保护控制
过电压保护控制,具体电路如图3所示:整流二极管D4 接过电压保护继电器JDQ1输出。 充电控制管理芯片MCP73831最大输入电压为6V. 虽然供电网络基本输出电压为5V,但当光照强度发生剧烈变化或负载变化较大时,输出电压仍然会有一定波动,为保护MCP73831不因短时的电压波动而损坏,设计了过电压保护控制器。 当W1 的电压超过6V, JDQ 1会断开输出电路,MCP73831因断电而得到保护。 具体分析如下:此部分电路设计主要采用了LM 2903电压比较器和外围电路扩展而成。 LM 2903包含两路比较器,1, 2, 3脚为一路, 1脚为OU TPU TA, 2, 3脚为IN PU TA. 5, 6, 7脚为另一路, 7脚为OU TPU TB, 5, 6脚为IN PU TB. 其中过电压保护控制器用5, 6, 7脚的比较器。电阻R11 , R13分压后接至比较器的5脚。 当电压大于6V 即分压值大于214V. 比较器的7脚输出电平由低转为高。 Q3 饱和导通,则Q5 截止,安全工作指示灯熄灭,接点J1为高电平,此时JDQ 1开始工作,供电电路与后续电路断开,同时过电压红色警示灯亮起。
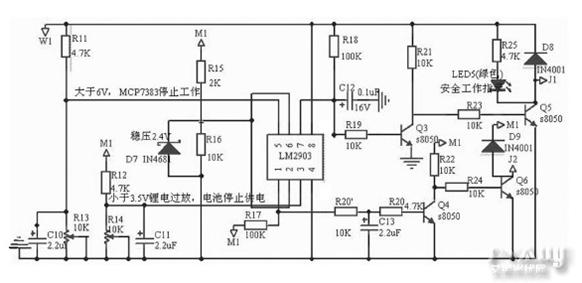
图3 过电压与过放电保护控制电路
过放电保护控制
当锂电池电压低于315V 时,即电池电量释放92%以上时,认为不能继续放电,否则锂电池内部介质会发生变化,致使充电特性变坏,容量降低等。 为此设计过放电保护控制电路,此电路的具体设计如图3,分析如下:采用了LM 2903的1, 2, 3脚组成的一路比较器,与外围器件构成过放电压比较器, R12 , R14分压后接至LM 2093的3脚。 当电压值小于315V 时,分压值小于214V, LM 2903的1脚由高电平转变为低电平, Q4 由导通转变为截止状态, Q6 饱和导通, JDQ2工作,同时过放红色指示灯亮。[page]
自动跟踪控制器
控制器的输入端,光敏传感器分别由两只光敏电阻串联交叉组合而成。 每一组两只光敏电阻中的一只为比较器的上偏置电阻,另一只为下偏置电阻。 一只检测太阳光照,另一只则检测环境光照,送至比较器输入端的比较电平始终为两者光照之差。 具体电路如图4所示:光敏电阻RT1 , RT2 与电位器R27和光敏电阻RT3 , RT4 与电位器R28分别构成光敏传感电路。 将RT1 和RT3 安装在垂直遮阳板的一侧, RT4 和RT2安装在另一侧。 当RT1 , RT2 , RT3 和RT4 同时受环境自然光线作用时, R27和R28的中心点电压不变。 当只有RT1 , RT3 受太阳光照射, RT1 的内阻减小, LM 2903 的5 脚电位升高, 7 脚输出高电平, 三极管Q7 导通,JDQ 4工作,其触点3, 5闭合。 同时RT3 内阻减小, LM 2903的3脚电位下降, JDQ 5不工作,电机M 正转;当只有RT2 , RT4 受太阳光照射,同理,电机M 反转。 当转到垂直遮阳板两侧的光照度相同时, JDQ 4, JDQ 5都导通,电机M 才停转。 在太阳不停地偏移过程中,垂直遮阳板两侧光照度的强弱不断地交替变化,电机不停的运动,使太阳能接收装置始终面朝太阳。
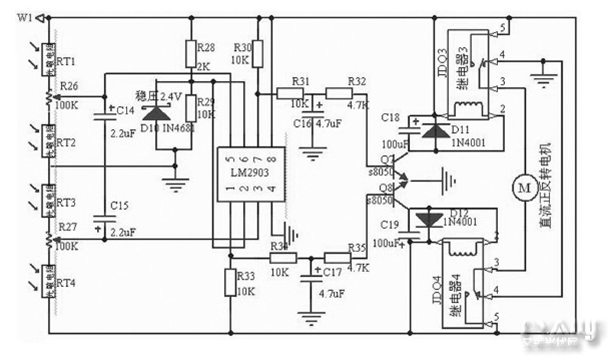
图4 自动跟踪控制器
充电管理电路设计
锂电池的充电过程一般分为3个阶段: ①涓流充电阶段。 ②恒流充电阶段。 一般可以充电到电池容量的85%左右。 ③恒压充电阶段。锂电池过充,轻则减少电池寿命,性能变坏,重则产生漏液等。在本文的设计中,采用了线性充电管理芯片MCP73831,如图1所示。 该芯片具有输出电压准确,任意设定充电电流,自动转换充电模式,消耗电流极小(25uA ) ,过充监测保护等功能和特点。 MCP73831各管脚的功能:
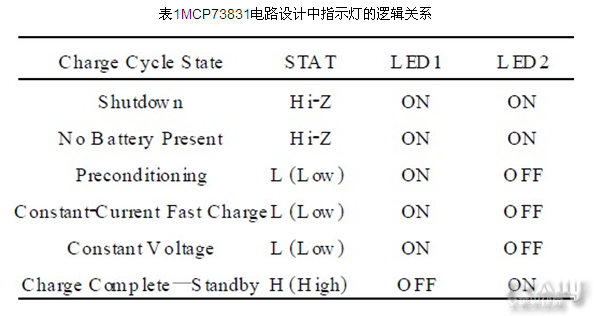
VDD 为输入电压端; VSS 为参考零电压端; VBA T为充电控制输出端; STA T 为充电状态输出端。 PROG为电流设定与充电控制使能端。 锂电池充电时,充电管理芯片MCP73831的PROG 接口须外接电阻到VSS,具体计算公式: IREG = 1000 (V ) /RPROG其中RPROG的单位为kΩ, IREG的单位为mA. 在本文设计中RPROG = 2kΩ。
则IREG = 500mA. STA T的各接口状态及电路设计中指示灯的逻辑关系如表1所示。 充电管理芯片MCP73831通过检测锂电池的BA T引脚来判断电池的各个状态,从而对电池进行充电管理。 不发生过电压保护时,供电网络一方面对MCP73831提供5V 电压。 一方面通过D 5传输到JDQ2对后续电路供电。 应急充电时,外接5V 电源,一路通过D5到继电器JDQ 2. 另一路到达MCP73831对锂电池充电。 D5 阴极端输出电压5(V ) - 017 (V ) = 413 (V ) ,由于锂电池的电压在充满或非充满电状态的时候,都低于D6 阴极输出端电压(D5 , D6 共阴极) , 所以在应急充电的过程中, RT9193 正常工作。 在CMOS ( comp lem entary m etal2oxidesem iconducto r)型电压调节器RT9193的B P端和地之间连接一个22nF的电容,可以极大的减少调节器的输出噪声。在常温状态下,充电完成时电压412V 的锂电池, 消耗了90%的电量时候, 电压仍然会保持315V. 本文设计中选用电压调节器RT9193,即使314V 的时候,输出电压仍然可以稳定在313V。[page]
试验数据及结果分析
在调试中, 采用模块化测试的方法, 最后进行联合调试。 对供电网络进行测试,选用可调电源,调节输入电压,输出电压及试验数据如表2所示。 通过应急充电接口接入标准5V 电压,断开RT9193,对进行测试时,没有连接二极管D5 , D6 ,发现MCP73831的指示灯指示不正确。 分析发现, 不连接二极管D5 , D6 , 相当于RT9193直接连接在BA T引脚输出,在MCP73831上电的瞬间, 要检测BA T的状态, RT9193的输入引脚及支路连接到锂电池的正极,直接影响到了MCP73831对BA T引脚的检测状态,致使充电进入涓流充电阶段。 增加D5 , D6后,再进行试验,指示灯符合逻辑要求。 测试输出电流为最大为485mA,充电电压达到412V 时,绿色指示灯熄灭,红色指示灯亮起,完成对锂电池的充电。 W1 接入0~10V 可调节电压源(初始值设为5V ) ,M1 接入0~5V 可调节电压源(初始值设为4V ) ,调节滑动变阻器R13 , R14. 使W 1输入电压6V 时LM 2903的7脚由低电平转为高电平。 测量此时滑动电阻器R13 = 3115kΩ, 固定此电阻值。 M1 输入电压315V 时LM 2903的1脚由高电平转为低电平,测量此时滑动变阻器R14 = 1kΩ,固定此电阻值。 此时发现LM 2903的1脚输出处于临界值,不停的在高低电平之间变换,继电器JDQ2不停的通断, 减少了JDQ2的使用寿命,极易损坏无线示功仪及无线网络设备, 对无线设备的寿命影响也极大。 分析发现:在过放电保护过程中,检测值和比较值如果达到基本一致的状态,则会产生临界保护。 为此在电阻R20与R′20之间接电解电容C13 ,通过对电容的充放电,延迟了Q4 的关断时间,增加了开启和关断的时间间隔,电容的大小决定了时间间隔的长短。 该时间即为过放保护控制器的保护延时时间。 设计选用212μF电容,测试发现延时15s左右。
自动跟踪控器调试,调试时W1 接5V 电源,用一只100W 灯泡照射RT1 与RT3 并移动灯光,可以发现太阳能采集板跟着灯光运动。 但稳定状态时电机不停震动, 此时通过在电阻R31与电阻R32之间增加一个417uF电容,延迟电机启动、停止时间。 经测试发现延时时间40s左右,相对太阳照射时间来说,此时间可以忽略不计,不影响跟踪功能。 同理在电阻R34与电阻R35之间增加一个417μF电容。 经测试发现:可以完全消除电机震动现象且跟踪效果良好。 各部分独立调试完成后对供电网络和充电管理芯片MCP73831进行联调,然后增加RT9193进行调试, 最后实现整个系统的调试。 经测试证明, 实现了设计目标和功能要求。
结语
此智能型太阳能充电电路,具有工作性能稳定,运行安全可靠、低损耗,高效率、结构简单,输出电压精度高等优点。 自动调节占空比的供电网络与电源管理芯片的相结合,过压与过放电保护,自动跟踪太阳等功能是比较有创造性的设计方式,特别是将这些设计应用到油田无线示功仪和无线网络节点中,是一种崭新的尝试,也是应用上的突破。 目前本文所设计开发的太阳能充电及自动跟踪电路已经成功应用于江苏油田无线示功仪及其无线通讯网络中。 实践证明该系统充电速度快, 效率较高, 可以实时跟踪太阳, 工作稳定,维护量少。 具有较高的实用及推广价值。
分享到:
相关文章
- 一种基于智能大电流锂离子电池的线性充电方案2013-12-17
- 智能太阳能充电电路设计2013-07-01
- MOTEC智能双轴光伏跟踪系统的功能和优势 2013-05-27
- 智能太阳能充电电路设计2012-12-11
- 新一代MOS技术智能接线盒2012-07-12
专题报道
- 第九届中国(无锡)国际新能源大会
-
 本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...
本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...











