

高效高性能光伏水泵专用变频器的研究与设计
发布时间:2012-12-10 来源: 光伏产业观察网
本文摘要:当今,随着常规能源如石油、煤炭等消耗量的大规模增加,日益恶化的生态环境迫使世界各国开始积极寻找一条新的可持续发展的能源之路。太...
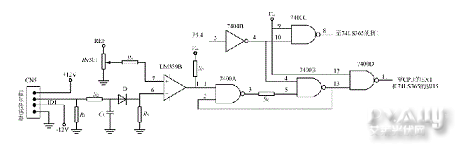
图5 直流侧过流、短路保护
系统的控制原理框图
系统的控制原理框图如图6所示。
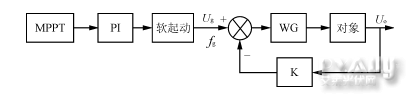
图6 系统控制原理框图
由图6可知,本系统结合太阳电池的功率特性曲线,采用逐步逼近法来实现太阳电池的最大功率点跟踪(MPPT),其中MPPT模块的功能是通过比较前后两次太阳电池的工作电压和负载工作频率,而输出一个逐步趋近最大功率点处的电压值;同时,为了消除系统振荡和提高动态响应速度,设计了PI调节结合软起动的控制方式,通过不断改变负载的工作频率使太阳电池的工作电压最终等于MPPT的输出电压值。图7和图8分别为MPPT和PI程序流程图,软起动程序流程图略。

图7 MPPT程序流程图
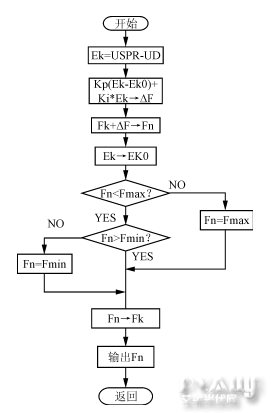
图8 PI程序流程图
分享到:
相关文章
- 实现更高效可靠的太阳能逆变器设计2013-11-04
- 电源:高效晶体硅太阳能电池-PERL电池2013-11-04
- 高效高性能光伏水泵专用变频器的研究与设计2012-12-10
- 高效太阳能电池研究现状综述2012-12-07
- 兼具高效率与低成本的Manz选择性发射极以及丝网印刷工艺2011-07-21
专题报道
- 第九届中国(无锡)国际新能源大会
-
 本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...
本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...











