

光伏系统最大功率点跟踪技术的比较
发布时间:2012-11-29 来源: 清华大学学报
本文摘要:针对目前光伏系统最大功率点跟踪(MPPT)技术研究和应用现状,根据控制算法的不同分类,选取干扰观测法、电导增量法、模糊控制法作为研究...
1.3模糊控制法的实现
定义输出偏差E及其变化率CE作为模糊控制器的输入,将控制系统所需要的控制变化量以微分dD的形式从模糊控制器输出[7]。若当前采样和上次采样数值分别用n和n-1来表示,则可定义模糊控制器输入变量ec(n)及其变化率Δec(n)的函数表达式为[8210]:
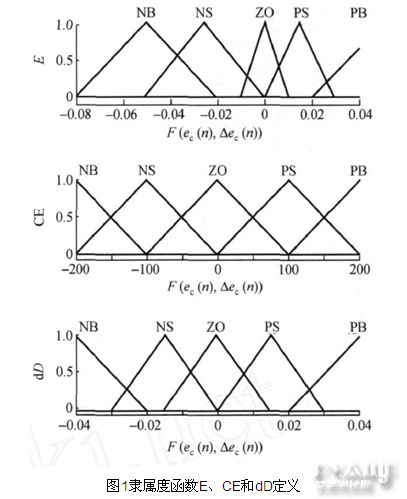
定义模糊控制规则为:若当前正向调节控制PWM占空比使输出功率增加,则继续正方向调整,反之则反方向调节,调节幅度由具体的模糊规则表和隶属度函数经模糊控制器输出决定。定义模糊集合:ZO=零PS=正小PB=正大NB=负大NS=负小。定义模糊函数F(ec(n),Δec(n))的输入输出隶属度函数E、CE、dD如图1所示。
对模糊控制器输出dD进行积分运算,即得控制所需的占空比D,输出作用于主电路开关器件。
2系统仿真
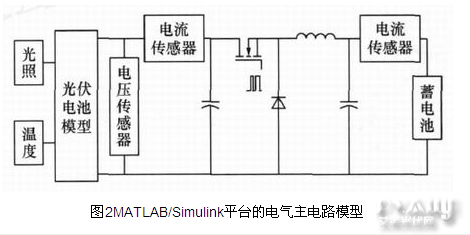
根据MPPT的控制方法,建立由光伏电池通过Buck电路对蓄电池进行最大功率充电的主电路模型,采用MATLAB/Simulink进行仿真,模型中包括光伏电池模块、主电路模块和控制模块,其电气主电路模型如图2所示。
分享到:
相关文章
- 逆变器洪荒之力—高温过载2016-08-19
- 极限温度对光伏组件串联个数影响分析2015-09-16
- 谁“偷”走了电站6%的发电量2015-09-11
- 荒漠电站最佳解决方案-箱式逆变房2015-08-27
- 【实用】光伏电站操作流程2015-08-03
专题报道
- 第九届中国(无锡)国际新能源大会
-
 本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...
本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...











