

新型光伏电池最大功率点跟踪控制方案
发布时间:2012-11-21 来源: OFweek太阳能光伏网
本文摘要:太阳能光伏电池(简称光伏电池),用于把太阳的光能直接转化为电能。目前地面光伏系统大量使用的是以硅为基底的硅太阳能电池,可分为单晶...
寻找最大功率点的方向,该控制方法控制思路简单,实现较为方便,跟踪效率高,提高太阳能的利用效率,但是扰动观测法或爬山法的步长是固定的,如果步长过小,就会导致光伏阵列长时间地停滞在低功率输出区,如果步长过大,就会导致系统振荡加剧,并且在日照强度变化时会产生误判现象。电导增量法是通过调整工作点的电压,使之逐步接近最大功率点电压来实现最大功率点的跟踪,该方法能够判断工作电压与最大功率点电压的相对位置,能够快速地跟踪光强迅速变化引起的最大功率点变化,控制效果好,稳定度高,但是该控制算法较复杂,对控制系统性能和传感器精度要求较高,硬件实现难。除以上几种常用的MPPT控制方法外,目前不断出现一些较新、较实用的MPPT算法,如直线近似法、三点重心比较法等。这些算法既参考了已有的比较成熟的方法,又在其基础上进行了改进和创新,跟踪精度有了进一步的提高。同时,以模糊控制法、神经网络控制法等为代表的新算法的出现,也为最大功率点跟踪控制技术的快速发展提供了坚实的数学基础和理论依据。对于各种MPPT算法优缺点的比较分析如表1所示。由以上研究分析发现,每种MPPT控制方法各有其优缺点,在实际工作中需要综合考虑,根据不同的环境采用不同的控制方法,既能提高利用效率又能缩小成本。
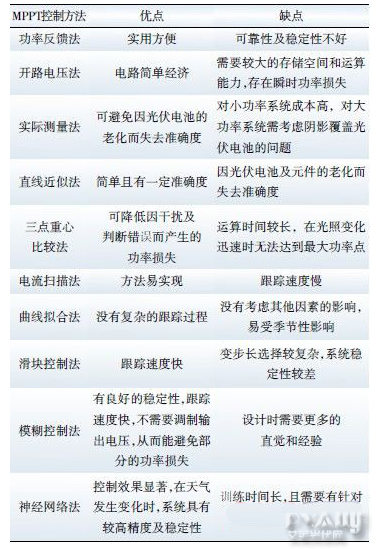
表1 MPPT控制方法比较
改进爬山法研究
考虑到爬山法有较好的跟踪效率,且实现简单等显著优点,本文采用一种改进爬山法,该方法采用CVT启动及变步长的控制策略。CVT启动方法是以0.78倍的开路电压作为爬山法的运行初值,能较好地克服爬山法在启动时产生的采样误差的缺点,能提高跟踪速度。变步长控制法的思想是:当距最大功率点比较远时,步长取较大,跟踪速度加快;当距最大功率点比较近时,步长取较小,慢慢接近最大功率点;当非常接近最大功率点时,稳定在该点工作。该变步长法能克服爬山法在最大功率点附近振荡的缺点。改进爬山法控制流程图如图3所示。
分享到:
相关文章
- 逆变器洪荒之力—高温过载2016-08-19
- 新型银纳米点增强非晶硅薄膜的光吸收 2013-06-19
- 新型印刷技术提高太阳能电池的盈利能力2013-04-02
- 新型光伏电池最大功率点跟踪控制方案2012-11-21
专题报道
- 第九届中国(无锡)国际新能源大会
-
 本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...
本届新能源大会以“新城镇、新能源、新生活”为主题,举办2017全球新能源产业峰会及“光伏+”跨界、绿色建筑、分布式市场营销等10场专业论坛,国家能源局新能源和可再生能源司...











